K. Suryanarayanan, P. Patel, A. K. Pathak, and H. Singh
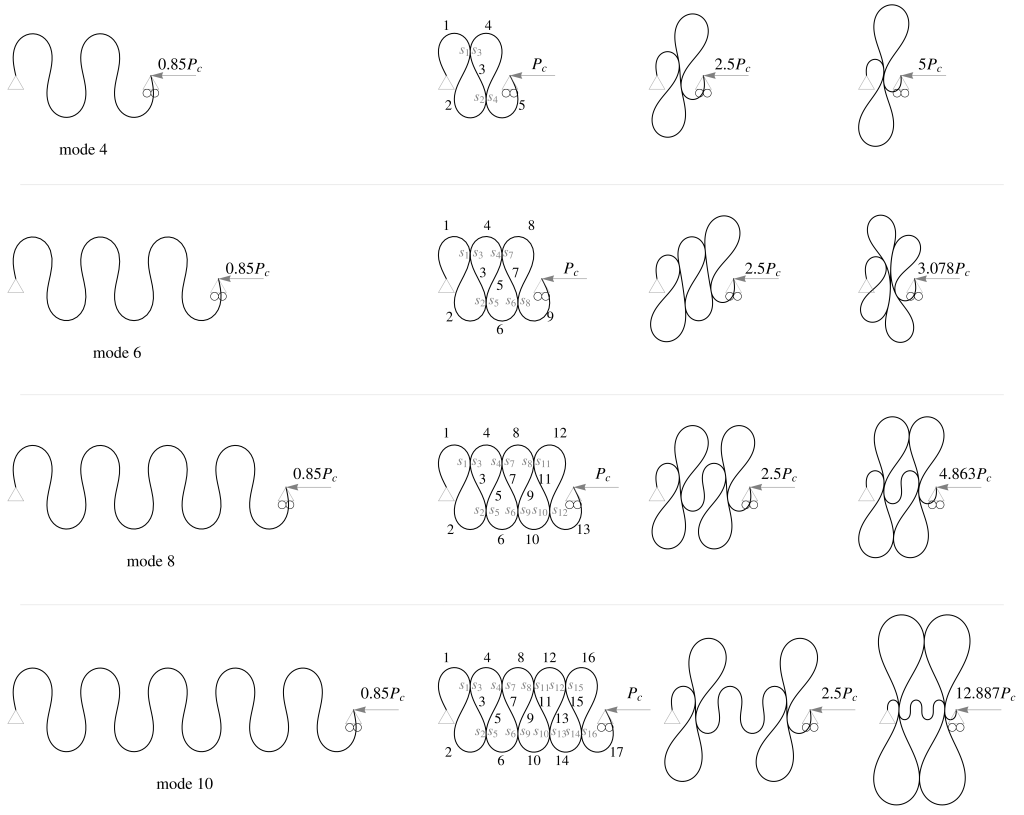
We explore the mechanics of a terminally loaded buckled elastica under frictionless self-contact. With the aid of two integrals associated with the elastica, we propose a scale-invariant condition necessary for the onset of contact. The condition is independent of the boundary conditions, does not involve the position vectors of the material points, and delivers the value of the compressive load at which self-contact initiates. Furthermore, we show that one of the two integrals, namely the Hamiltonian, persists after contact. We compute post-contact configurations of modes three through ten for a pinned-pinned buckled elastica. At a given value of the compressive load, we report multiple post-contact configurations for modes eight and nine. Finally, we show that an infinite force is required to transition from a point contact to a line contact in symmetric post-contact configurations of odd modes.